4 月 24 日,DeepSeek 发布其最新版本 DeepSeek-V41 技术报告,并同步开源代码与模型权重。DeepSeek-V4 在多项评测中达到 SOTA 水平;在效率方面,相较于 DeepSeek-V3.2,DeepSeek-V4-Pro 的单 token 推理 FLOPs 降至 27%,KV 缓存缩减至 10%,从而稳定支持百万级 token 的长上下文处理。
DeepSeek-V4 技术报告包含四部分内容:算法架构、基础设施(infra)、预训练、后训练。本文结合公开的技术报告与代码,聚焦算法架构部分;其余内容可参考完整技术报告。
算法架构概述
DeepSeek-V4 的算法架构整体延续 DeepSeek-V32 的设计,主要在以下几个方面进行了优化:
- 将 Transformer block 中的残差连接(Residual Connection)替换为 mHC(Manifold-Constrained Hyper-Connections)
- 将 V3 的 MLA(Multi-Head Latent Attention)替换为混合注意力架构(Hybrid Attention Architecture)
- 使用 Muon 作为优化器
其他模块(如前馈网络 MoE 与多 Token 预测(MTP))基本与 V3 保持一致。
Transformer Block
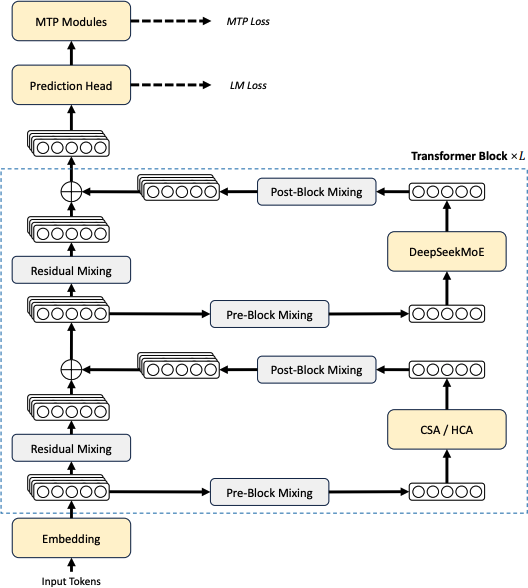
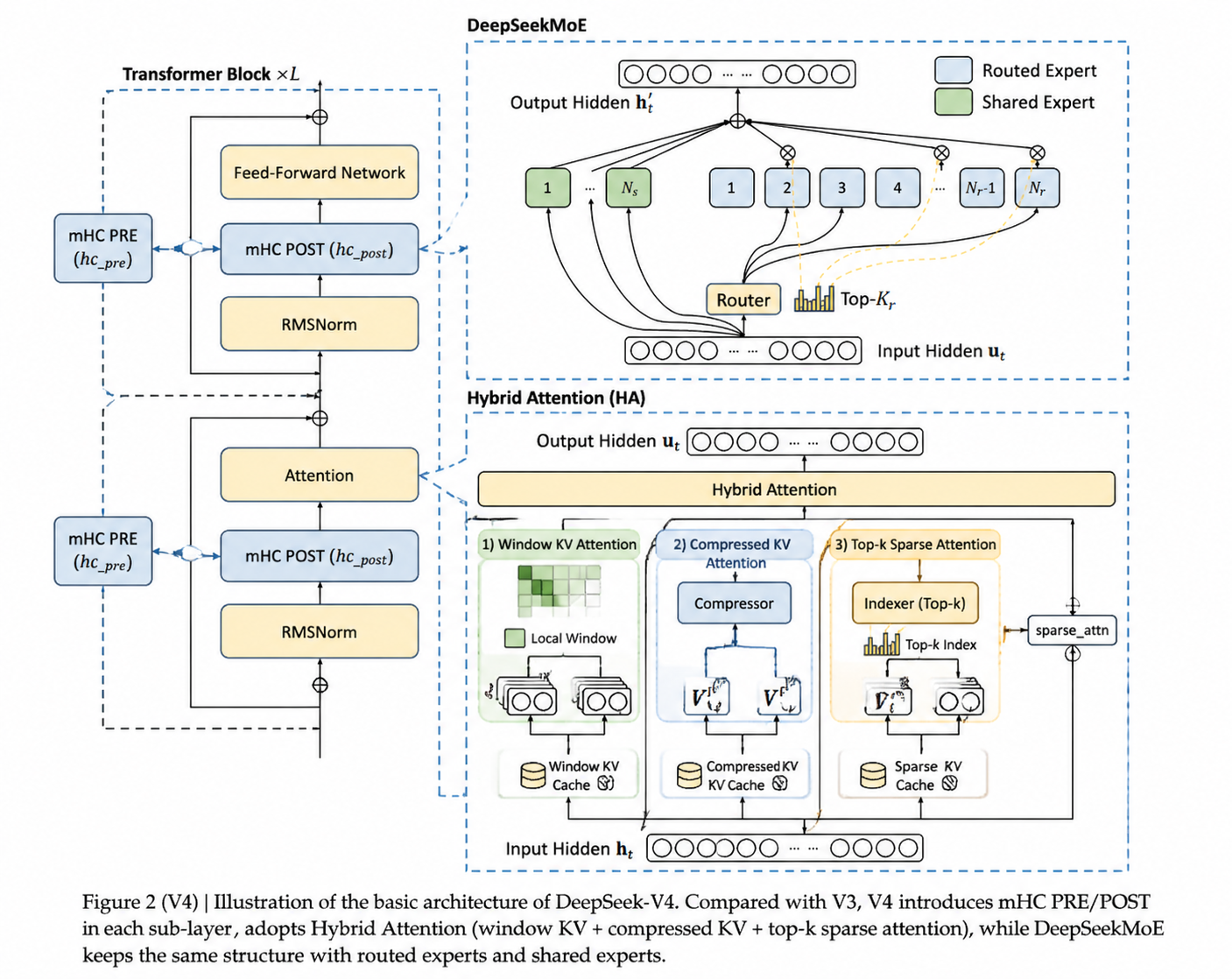
前两项优化点都发生在 Transformer block 内部。如上图所示:DeepSeek-V4 在注意力层混合使用 CSA(Compressed Sparse Attention)与 HCA(Heavily Compressed Attention),在前馈层使用 DeepSeekMoE,并通过 mHC 强化传统残差连接。
mHC(Manifold-Constrained Hyper-Connections)
DeepSeek-V4 系列引入 mHC 用以强化相邻 Transformer block 之间的信号传播。与传统残差连接相比,可以把 mHC 理解为:把“一个残差流”升级成“多条并行残差流”。具体实现时,通过 repeat 将单个残差流扩展为多条并行残差流。
| |
每一层会动态决定:(1)从哪些流里读出主表示去做子层计算;(2)把子层输出写回到哪些流里;(3)让这些流之间按一个受约束的“混合矩阵”交换信息。以下给出 mHC 和传统残差连接的代码对比:
| |
mHC 实现里,输入的 x 是一个 [batch_size, seq_len, hc, hidden_size] 的张量,其中 hc 与 hc_mult 对应同一超参数,用于控制并行残差流的数量。
函数 hc_pre 决定“这一层该从哪几份副本读信息”,即从多流中计算主表示用于后续子层计算。下面给出一个实现片段:其中 hc_fn 可理解为线性映射的参数,用于将输入映射到 mix_hc 个维度;hc_scale 是 3 维张量,用于控制混合矩阵的约束;hc_base 是 mix_hc 维张量,用于初始化混合矩阵。
hc_split_sinkhorn 是一个函数,用于将混合矩阵拆分成 pre、post 和 comb 三部分,分别对应了“从哪些流里读取信息”、“写哪些流里”和“混合矩阵”。
| |
hc_post 决定“子层的新信息写到哪些副本里,以及旧副本之间怎么混合”,即将子层的新信息写回到多流中,同时根据混合矩阵计算出新的主表示。这里用到 post 和 comb 两个张量,就是 hc_pre 中计算得到的分流矩阵和混合矩阵。
| |
混合矩阵的约束:在 mHC 中,每个 token / 层都会生成一个流间混合矩阵(代码里的
comb),用于在多条“残差流”之间搬运与重组旧状态。如果不加约束,混合矩阵可能出现尺度放大、信息坍缩到少数通道等问题,导致训练与深层信息传播不稳定。Sinkhorn 迭代通过交替进行行/列归一化,把混合矩阵投影到近似“双随机矩阵”(非负、行和列都约为 1)的集合附近,从而实现“质量守恒”的稳定混合:信息在通道间可交换,但不易无界放大或被单通道吸走。
hc_sinkhorn_iters控制该投影的迭代次数,次数越多约束越严格但计算开销更大。
mHC 通过多流、可路由且受约束的残差机制,提升了表示的可分解性与信息传递灵活性,同时改善深层训练与长程依赖建模的稳定性。
混合注意力(Hybrid Attention)
尽管目前出现了各种注意力机制(Linear Attention、Sparse Attention、Heavily Compressed Attention 等),它们的核心目标大多是在尽量不损失效果的前提下提升计算效率。从实现形式上看,这些机制仍遵循自注意力的通用框架。下面给出一个简化的伪代码:
| |
Q, K, V 映射与位置编码注入
首先介绍 x_to_q、x_to_k、x_to_v 这三个函数,它们将输入的 x 分别转换为查询、键值张量。insert_position_embedding 函数用于将位置编码注入到查询、键值张量中。 以下是 DeepSeek-V4 中的实现:
| |
使用线性层映射将输入映射到对应的维度空间,并使用相对位置编码注入位置信息;可以注意到多头的设置主要在 q 上。其中 act_quant 的作用是量化,把 KV 向量里“非 RoPE 的维度”做 QAT 对齐量化为 FP8 精度,而 RoPE 相关维度保持原精度,以兼顾“与训练时量化分布一致”和“位置编码精度”。
Sparse Attention
在完成 \(q\)、\(k\)、\(v\) 以及位置编码注入后,Hybrid Attention 的关键不在于对所有历史 token 计算完整的注意力矩阵,而是先为每个 query token 构造一个候选 KV 索引集合 topk_idxs,然后只在这些候选位置上做注意力计算(Sparse Attention)。这样复杂度从 \(O(L^2)\) 下降到近似 \(O(L \cdot K)\),其中 \(K\) 是每个 query 对应的候选集合大小。
在 DeepSeek-V4 中,候选集合由两部分组成:
- Window tokens(局部高保真):滑动窗口内的最近历史 token,保证局部依赖的精细建模。
- Compressed tokens(全局低成本):对远程历史做压缩后得到的 KV 记忆,用少量 token 覆盖长上下文。
| |
其中:
win = window_size:窗口大小(如 128)。ratio = compress_ratio:压缩比,ratio>0表示该层启用压缩记忆。offset:将窗口索引与压缩索引映射到统一的 KV 缓存坐标系(prefill 与 decode 阶段略有不同)。关于 KV cache 的背景可参考 Qwen3-Omni 博客的附加内容。
CSA 与 HCA:两种压缩策略的对应关系
在开源模型 DeepSeek-V4-Pro 中,模型一共有 61 层,对于每一层注意力机制的压缩率列表如下:
| |
除了最后一层,其余层都对历史窗口做了不同程度的压缩,压缩比的选择分别是 $4$ 和 $128$ 两种,分别对应 CSA(Compressed Self Attention, compress_ratio=4)和 HCA(Heavy Compressed Attention, compress_ratio=128)两种压缩注意力机制。
两种压缩注意力机制在筛选候选 KV 索引时,分别采用不同的策略。CSA 更强调“相关性选择”,HCA 更强调“极致压缩”。
- CSA(Compressed Sparse Attention):轻度压缩 + 稀疏检索。该模式下会启用
Indexer:对压缩 KV 做学习型相关性打分,并为每个 query 选择 top-k 压缩位置,从而实现“压缩 + 稀疏检索”的长程注意力。
CSA 选择器层 代码实现 (可跳过,本篇暂不展开讨论实现细节)
| |
- HCA(Heavily Compressed Attention):重度压缩。此时压缩 token 数量极少,更偏向全局摘要记忆;实现上一般不启用学习检索,而是使用规则映射生成压缩候选索引,以获得极低成本的长上下文覆盖。
HCA 选择函数 代码实现
| |
在获取到候选索引 topk_idxs 后,模型调用 sparse_attn(q, kv_cache, ...) 仅对候选位置执行注意力计算。模型只需关注候选集合中的有效 token,而无需处理所有历史 token,从而实现高效计算。
输出投影
注意力输出 o 会先对 RoPE 维做逆变换(inverse),再通过分组的低秩输出投影映射回原始维度空间,得到该注意力层的最终输出:
查看代码:输出投影
| |
至此,Hybrid Attention 在保持窗口注意力高保真建模能力的同时,引入压缩记忆与稀疏计算,实现长上下文场景下的高效注意力计算。
Muon
本节不展开 Muon 的细节,可参考 Moonshot Muon。
DeepSeek-V4 优化器配置细节
DeepSeek-V4 对优化器采用精细化分工:
| 优化器 | 覆盖参数 |
|---|---|
| AdamW(Loshchilov & Hutter, 2017) | 嵌入层、预测头、mHC 静态偏置与门控、全部 RMSNorm 权重 |
| Muon | 除上述外的所有可训练参数 |
Muon 实现沿用 Moonshot 版三项核心技巧:
- 对 Muon 参数施加 权重衰减
- 引入 Nesterov 动量 提升收敛稳定性
- 对更新矩阵做 RMS 重缩放,直接复用 AdamW 超参数,无需二次调参
与原版差异:
- 正交化步骤改用 混合 Newton-Schulz 迭代,兼顾数值精度与低延迟
- 移除 QK-Clip 技巧
如有错误或遗漏,欢迎指正!
DeepSeek-AI, DeepSeek-V4: Towards Highly Efficient Million-Token Context Intelligence. https://huggingface.co/collections/deepseek-ai/deepseek-v4 ↩︎
DeepSeek-AI, DeepSeek-V3 Technical Report. https://github.com/deepseek-ai/DeepSeek-V3 ↩︎